The communication basis for PROFIBUS lies in the cyclic data exchange between PLCs (masters) and devices (slaves). PROFIBUS components communicate using the PROFIBUS DP (Decentralized Periphery) communication protocol, which is the same for all applications and which allows cyclical and acyclical communication.
The core of the communication process of PROFIBUS DP is the master-slave method. A cycle will consist of a master sending outputs to, and receiving inputs from all of its devices, and then repeating the cycle. This process also includes a device-, module-, and channel-specific diagnostics.
Cables, Connectors, and Other Specifications
PROFIBUS is based on RS-485, which is a common serial communication method. PROFIBUS networks are generally characterized by purple single-pair RS-485 cabling. And those cables use the standard DB9 or M12 connectors.
PROFIBUS DP can transport 244 bytes of data from 9600 bit/s up to 12 Mbit/s. This range of speeds can accommodate nearly every application. There are some instances under which copper wired transmission technology reaches its limits, (i.e., substantial interference or long distances). In these cases, optical transmission via fiber cables is available.
Master-Slave
PROFIBUS employs a master-slave interaction between its network components. In a master-slave interaction, the master has unidirectional control over all its slave devices and processes. The controller will always be the master, and the IO devices will always be slaves.
The polled slave answers the prompting master with a response message. The request message contains the output data, and the associated response message includes the input data. Finally, a bus cycle comes to an end once all connected slaves have been polled in order.
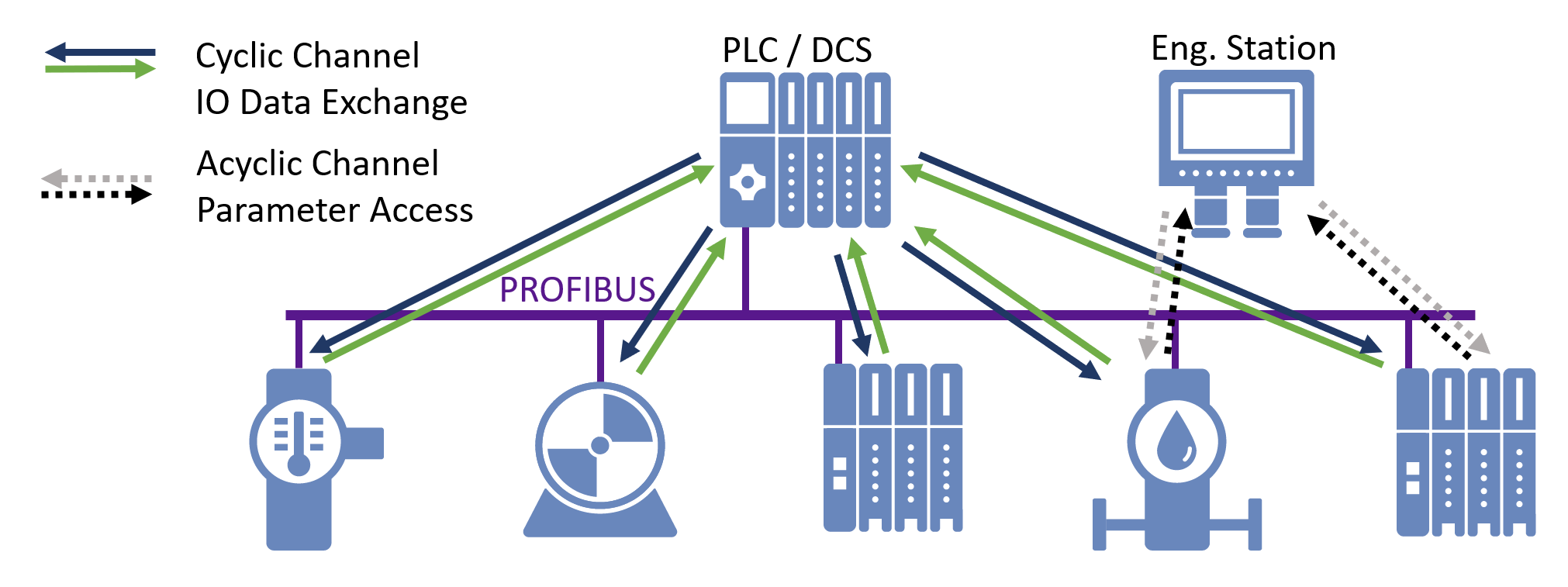
In addition to cyclical communication for the fast exchange of input and output data between the master and slaves at regular intervals, need-based data can also be transmitted using PROFIBUS, e.g., device setting data. A master has the initiative, accessing the data of a slave in read or write mode acyclically.
A crucial part of the acyclical data exchange process is the writing or reading of device parameters at the behest of the master. These device parameters can be used by a centralized operator tool to configure a field device, thereby adapting it to the specific task it has been charged with performing in the technical process.
PROFIBUS DP Versions
The functions of the PROFIBUS DP communication protocol are distributed over three performance levels:
 Version DP-V0: Provides the essential functions of the communication protocol. It includes cyclical communication and device-, module- and channel-specific diagnostics for quick fault localization.
Version DP-V0: Provides the essential functions of the communication protocol. It includes cyclical communication and device-, module- and channel-specific diagnostics for quick fault localization.
Version DP-V1: Supplements DP-V0 with functions for acyclical communication, i.e., parameterization, operation, monitoring, and alarm handling.
Version DP-V2: Contains additional functions as extensions of DP-V1 for drive control. These include features for communication between slaves, cycle synchronization, and time stamping.
PROFIBUS DP Device Classes
There are three PROFIBUS devices classes based on their functions:
PROFIBUS DP Master Class 1
A PROFIBUS DP master of class 1 (DPM1) is a master that uses cyclical communication to exchange process data with its associated slaves. Devices of this type are often integrated into a memory programmable controller or an automation station of the process control system.
PROFIBUS DP Master Class 2
A PROFIBUS DP master of class 1 (DPM2) is a master that can be used to set device parameters via acyclical communication. Devices of this type are usually part of an engineering station used for device configuration.
PROFIBUS Slave
A PROFIBUS slave is a passive communication node which reacts to prompts from the master by sending a response message. Devices in this class are usually field devices (remote I/O, drive, valve, transducer, analyzer) that acquire process variables or play a part in the process using manipulated variables.
There is a difference between compact and modular slave devices. A modular device comprises a head station containing the fieldbus interface and many slots into which various modules can be inserted. With multiple modules, modular slaves can adapt to different application requirements concerning input and output data. Compact devices have a fixed set of input and output data – comparable to a modular device with precisely one permanently installed module.
Frequently, PROFIBUS master devices support the functions of both a DPM1 and a DPM2. Similarly, there are also automation devices that can operate as both masters and slaves. In practice, it is rarely possible to unequivocally categorize physical devices into the function classes outlined above.
For a complete overview of PROFIBUS DP and PA, take our free training: PROFIBUS Online Training Course.